相关商品

AS-2WD 铝合金小车移动平台 移动机器人 【1:48电机版】 电子大赛
本店售价:¥149.00

AS-2WD 铝合金小车移动平台 移动机器人 【1:120电机版】 电子大赛
本店售价:¥149.00

AS-2WD 铝合金小车移动平台 移动机器人【舵机版】电子大赛
本店售价:¥238.00
【创客学堂】智能全向移动平台——自制攻略
编辑:Jack-Bei2013-12-30 390378261@qq.com 浏览次数:3321
个人喜欢电子制作,同样也爱好机器人。一次偶然的机会让我搜寻到一个国际工业机器人巨头——德国库卡(KUKA)集团的一款轮式机器人——OMNIMOVE,它长了一种在国人看来比较新奇的“脚”,英文名叫做MecanumWheels(唛克纳姆轮),是由瑞典MecanumAB 公司的工程师BengtIlon 于1973 年开发设计的.它主要由轮毂和具有特殊轮廓曲线的滚子组成,滚子均匀地分布在轮毂上,可以自由旋转,它的轴线与轮毂轴线成45°角,所有滚子组成的外包络线近似为一个圆(图1).在它被引入国内后,有人以此为创意设计出了一种新型的轮组——全向轮(图2),其运动和前者相似,同样也是咱们今天要讨论的主题。暂撇去复杂的轮组结构和受力运动分析公式,说白了也就是那几个轮子的一些简单的组合运动构成了全向运动形式。让我带领大家用咱们常用的单片机来控制全向轮的运动,设计出一系列属于我们的全向移动平台。
.png)
图1MecanumWheels(唛克纳姆轮)

图2全向轮
兵马未动,粮草先行
作之前咱们先好好看看,设计这个全向移动平台所需的材料。首先,隆重推出咱们的机器人的“脚”——全向轮(图3),由于搜寻了一下国内的市场,发现市场上的全向轮如图1所示的类型,价格昂贵,一般单个价格都在500元左右,而且国内生产此种轮的厂家很少,相比同尺寸的注塑算盘珠式的全向轮其价格优势特别明显,一般在30~50元左右,况且我们只是做一个模型平台,注塑算盘珠式的全向轮足以满足我们的设计需要。看完“脚”之后,让我们膜拜一下这个动力源吧,本设计中选用了4个360度舵机或者称作伺服电机(图4),相比于传统的普通电机,免去了繁琐的驱动电路,使控制更加方便简单。为了让我们的平台有一个联合的支座,因此要设计制作一个机器人的底盘,我习惯性的想到了亚克力(图5),它易于切割,打磨,是我们这群DIY爱好者理想的基材,在这里选用了一块30*15*5mm的有机玻璃板,市场价格一般在10元左右。在处理舵机和底板之间的连接问题时,我毅然选择了传统制作机器人时会选用的此类专用支架(图6)。下面就请大家好好看看这张材料清单吧,(表1)。

图3算盘珠式全向轮

图4 360°舵机(伺服电机)

图5 亚克力板
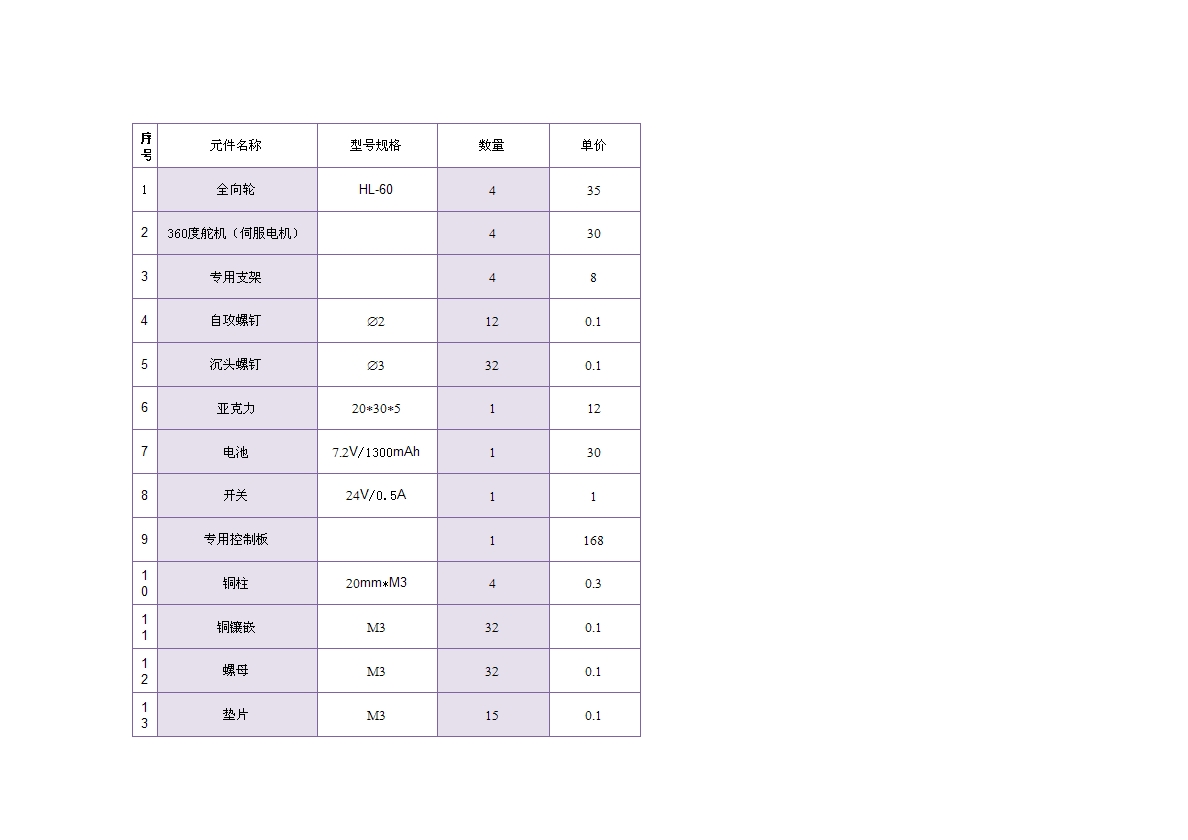
表 1元器件详细列表
在设计好全向移动平台的机械骨架后,咱们就来讨论一下小车的控制板吧。说到控制板,大家都会想到传统的51系列,AVR或者Arduino等,而我最近在研究一款新的微控制器,基于ARM-Cortex-M4内核的芯片,Freescale Kinetis系列的MK60DN512ZVLQ100,它有丰富的外设资源,可以灵活的应用于我的设计中,所以我毫不犹豫的选择了它作为我的控制器,可能有人会说我浪费资源,大材小用,但你肯定听过一句话“好马配好鞍”,个人感觉这个全向移动平台上可以加载很多意想不到的设备,但前提是有一款高性能的“心”,来完成你所给予它的繁重的任务和工作。本文章的讨论重点不在此,相关文章我将会陆续发布。
纸上谈兵,躬行实践
在整个制作中,需要花费精力最大的是加工亚克力的底盘,为了保证加工的精度,需要首先对我们实际应用的相关物件进行零件测绘,设计出底盘的平面图(如图7)。设计完成就开始加工,将设计的图纸按1:1打印出来,贴在亚克力上,然后用手锯慢慢将亚克力锯开,注意要留够余量,然后利用打磨机对余量进行打磨(当然没有打磨机的话,那只能慢慢拿锉来修整了),下一步就是钻安装孔了,钻孔的时候要注意,不要着急,慢慢进给,不然容易将亚克力钻裂。如果觉得透明的基板不好看的话,那就用自喷漆喷成自己喜欢的颜色(图8)。利用360度舵机自带的联轴器(盘),用¢2的自攻螺钉拧在全向轮的外缘,在安装时要注意保证二者同轴度。将舵机和相应的支架连接在一起,安装在刚才制作的底盘上,然后安装好设计的专用控制板,最后的小车全景图(图9),那就是“万事俱备,只欠东风”了。在借东风之前,还是再说说这个控制主板吧,其结构框图如(图10)示,如果你的手头没有我这块控制板的话,也不要紧,只要它具备了以下几个模块就可以,15V 1A的电源驱动能力,这个一般的电源稳压芯片都能办到,如78M05,LM2940-5.0,LM2576-5.0等,这些都可以自行选择,2有4个独立的PWM(脉宽调制模块)端口,由于我所选择的360度舵机的控制形式是,50HZ的方波脉冲,当脉宽为1.5ms时舵机停止转动,脉宽大于1.5ms时舵机正转,小于1.5ms时舵机反转,速度由其脉宽和1.5ms的差值决定,差值越大,其速度就越大。有了这两个必备的条件,你就可以在其上搭建自己的移动平台了。
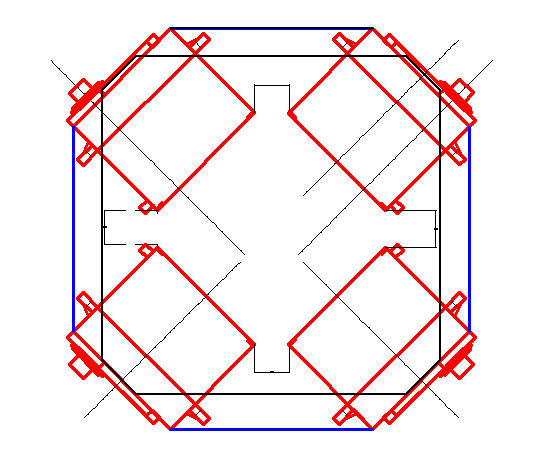
图7 全向移动平台底盘图纸

图8 实物图
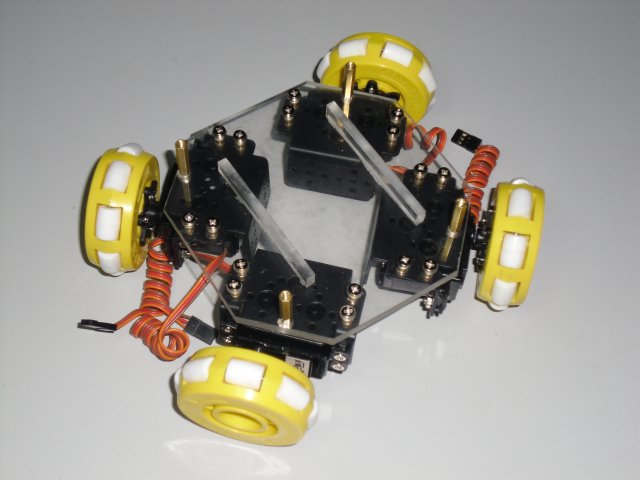
图9 安装完毕的实物图
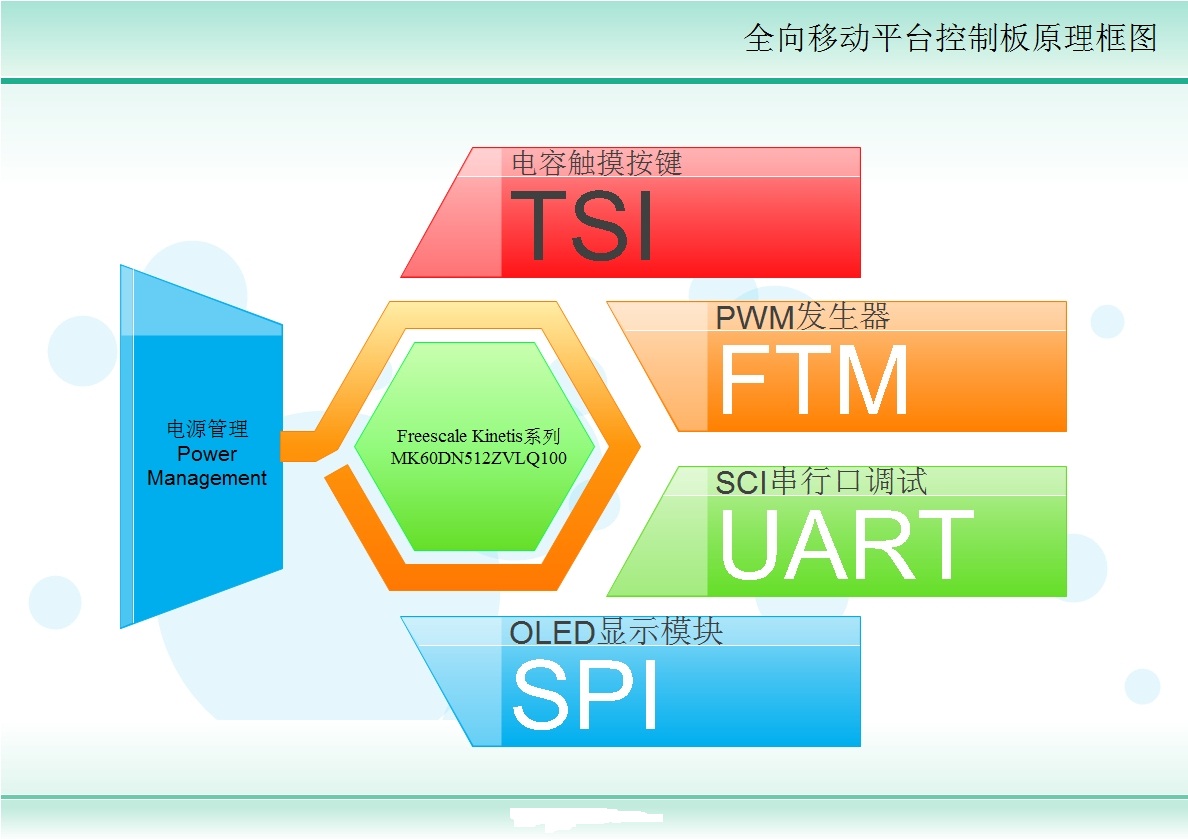
图10原理框图
身体力行,调试开始
经在网络上搜到关于全向轮式机器人的一张运动简图,如图(11),很明显可以看出其大致的运动规律,若想让小车向固定的一个方向前进,只需让我的小车的前进方向那侧的轮子向轴心处方向向心旋转,而背离前进方向的轮子向背离轴心处旋转(图12),同时为了保持运动平稳和可靠,必须保证4个轮子的运动速度相同。同理,可以得出实现前行、后退、左右横移的运动规律。在调试时为了保证轮子以滚动的形式前进而非滑动,就要严格调控其速度(由于每个舵机的差异,所以务必要将这种偏差消除,要对每个舵机实施微调参数,代码如图(13)),所以可以将小车如(图14)放置,修改PWM 的占空比来调控相应轮的转速,直至其能保持前行方向行驶1M以上。用相同的调试方法,同样可以得出小车 斜行、旋转及其组合运动的形式。最后我将其运动规律总结后,绘制(表格2)。有了这个规律后,我们就可以比较好的实现我们其他的开发想法了,比如遥控、循迹、声控、还有比较经典的机器狗,这些相信聪明的你肯定能设计出来,我也将在以后的文章中一一为大家展现。
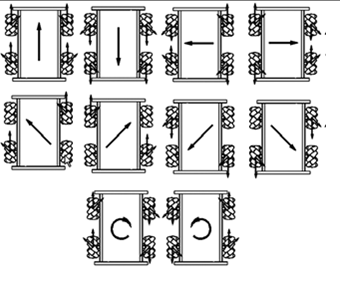
图11 MECANUM平台运动原理图
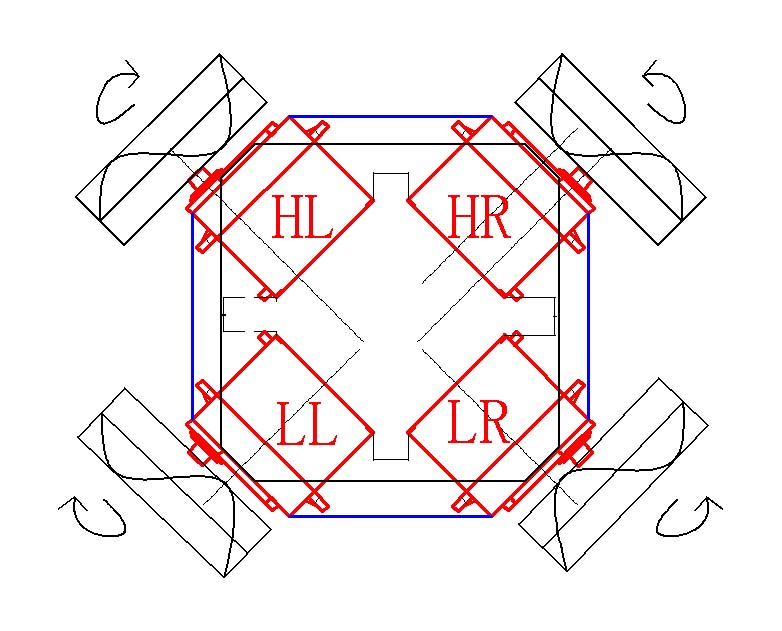
图12 前进时轮组的运动规律
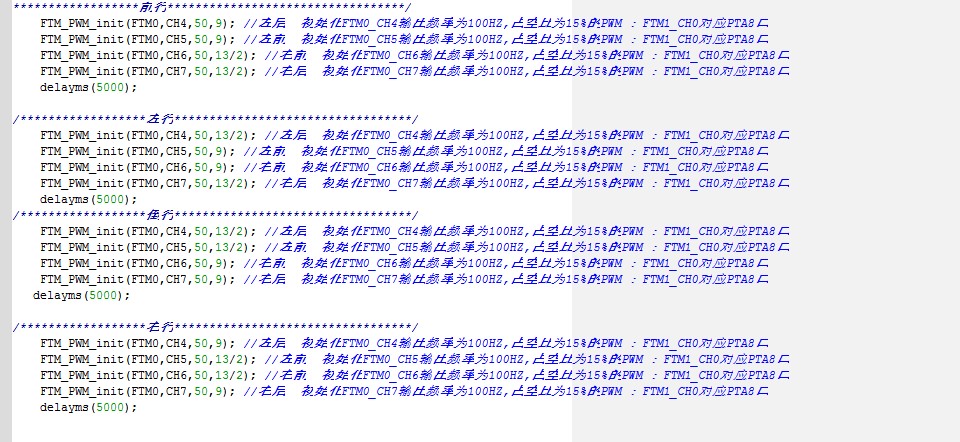
图13代码调试截屏
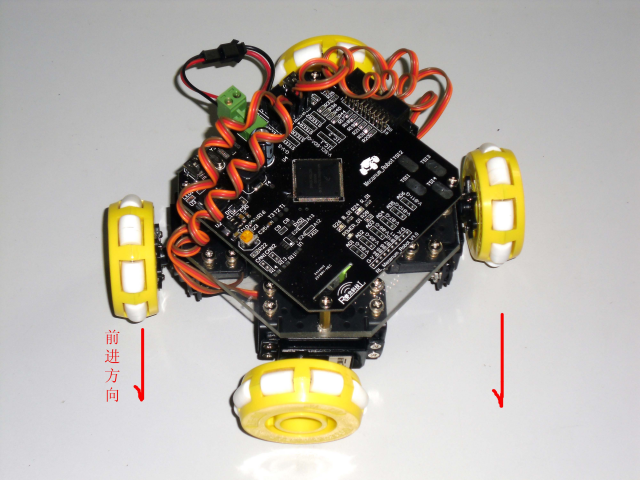
图14 如示放置

表2实际轮组运行规律
展望前景,一片前途
从这,大家应该明白这个小车和传统的四轮或者三轮机器人的不同了吧,在这个平台上可以在二维平面上产生3 个自由度的全向运动,能够沿着任意路径到达目标地点,尤其在狭窄或拥挤的环境中,它仍然具有传统运动设备无法比拟的灵活运动特性.同时,该技术还有效解决了长形物料在狭窄空间的转运问题。可见其应用是比较广的,据我现在了解,在国外的一些轮椅,AGV(自动引导小车),以及叉车上已经初露端倪了。
本文已刊登在《无线电》杂志2013年1月刊
用户评价
匿名用户
- 咨询内容:
- 非常棒,给我很多启发!谢谢楼主


